武科大網訊(通訊員曾憲森)近日,計算機科學與技術學院林云漢博士團隊的研究成果LangGrasp: Leveraging Fine-Tuned LLMs for Language Interactive Robot Grasping with Ambiguous Instruction被IEEE/RSJ智能機器人與系統國際會議(IROS 2025)錄用,林云漢博士為文章第一作者,我院碩士研究生吳文棋為第二作者,我校機器人與智能系統研究院院長閔華松教授為通訊作者。
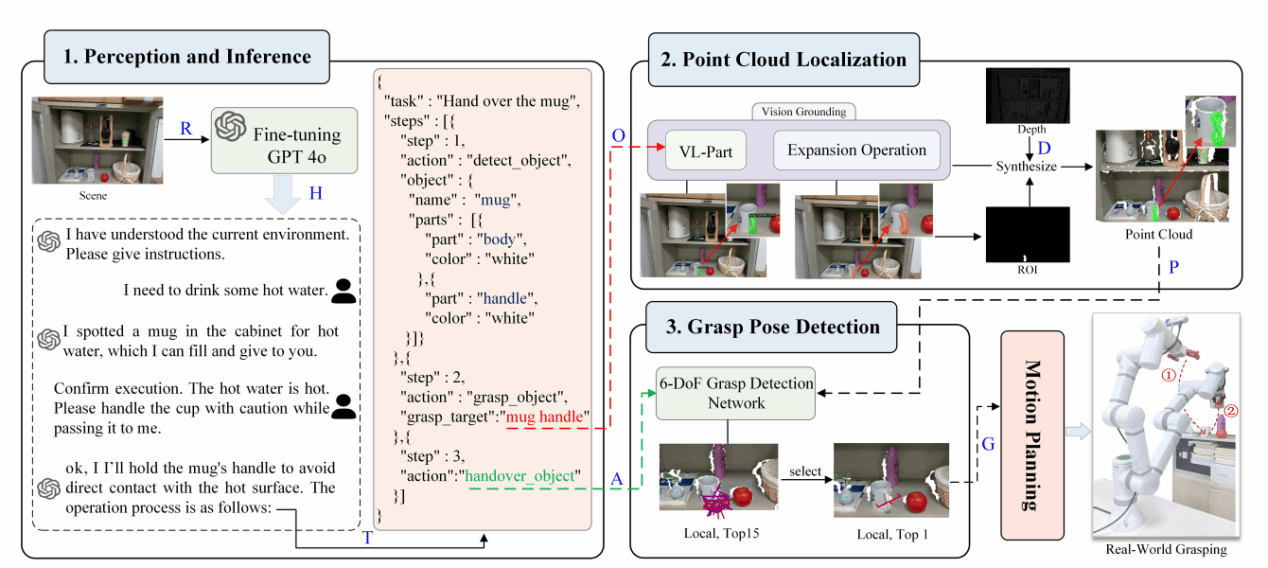
該論文提出了一種新的基于自然語言交互與大語言模型常識推理的機器人抓取框架LangGrasp。該框架集成了微調的大型語言模型(LLMs),以利用其強大的常識理解和環境感知能力,從而從語言指令中推斷隱含意圖,并澄清任務需求以及目標操作對象。此外,設計的點云定位模塊,在二維部件分割的指導下,實現了場景中的部分點云定位,從而將抓取操作從粗粒度的對象級擴展到細粒度的零件級操作,顯著提高了目標物體六自由度抓取姿態的質量和精度。
IEEE/RSJ 智能機器人與系統國際會議(IROS)自 1988 年創辦以來,已成為全球機器人與智能系統領域的頂級學術平臺之一。歷屆會議匯聚全球頂尖專家學者,推動機器人技術與智能系統的創新與發展。2025 年,IROS 將時隔 20 年再次回到中國,在歷史文化名城與科技創新高地——杭州舉辦。
據悉,本屆會議的主題為 “人類-機器人前沿”,聚焦于人工智能和機器人技術的突破性進展,探索人機協作、智能系統以及機器人應用的最新前沿。會議期間,將舉辦主題報告、論文展示、專題研討、行業論壇、機器人展覽、技術參觀等多種活動,為全球機器人學者和從業者提供一個高水平的學術交流和合作平臺。